




 致瑞新闻
致瑞新闻揭秘3D结构光相机的精度及影响因素
在现代工业4.0的浪潮中,“精度”已成为衡量生产线智能化水平的关键指标。从微米级的零件检测到毫米级的装配引导,精度直接决定了产品质量与生产效率。与传统2D相机不同,3D工业相机能够获取物体的深度信息,构建三维点云数据,实现对物体形状、尺寸和位置的全面感知。这种能力使其在精密测量、质量检测、机器人引导等领域展现出无可替代的价值。

然而,并非所有3D相机都能满足工业场景的严苛要求。在实际应用中,精度差异往往决定着检测结果的可靠性与产线的稳定性。
一、精度指的是什么?
在机器视觉的工程语境下,“精度”并非单一数值,而是一个需要明确定义的系统性概念,通常包含三个维度:
- 重复精度:在相同条件下(固定相机、固定环境、静止物体),对同一物体进行多次测量,其测量结果之间的一致性。这是机器视觉系统最关注、也最容易实现的高指标,直接关系到生产线的稳定性和可靠性。
- 例如:重复精度为±5微米,意味着每次测量的结果都在一个10微米的窄带内波动。
- 绝对精度:测量值与物体真实尺寸(通常以更高等级的计量设备,如三坐标测量机CMM的测量结果为真值)之间的绝对误差。
- 例如:绝对精度为±0.02毫米,意味着测量结果与真实尺寸的误差最大不超过0.02毫米。
二、精度受哪些因素影响?
精度是系统、物体与环境三者相互作用的结果。影响因素可归结为以下四大类:
第一类:系统硬件因素
- 基线结构与夹角:投影仪与相机之间的距离(基线)和夹角,是三角测量法的几何基础。基线越长,通常深度精度越高,但会牺牲视场或产生阴影。
- 核心传感器分辨率:相机传感器的像素数直接决定空间分辨率。投影仪的分辨率则影响编码图案的精细度。
- 光学镜头质量:镜头的畸变会直接引入测量误差。高质量、低畸变的工业镜头是保证精度的前提。
- 光源与编码方案:投影光源的稳定性、以及所使用的编码图案(如格雷码+相移法)的抗噪能力和解相精度,是算法的底层支撑。
第二类:标定与算法因素
- 标定质量:这是所有精度的基石。需要通过高精度标定板,精确获取相机与投影仪的内参(焦距、畸变等)和外参(相对位置关系)。标定误差会直接、成倍地传递到最终测量结果中。
- 核心算法:从图像中解算相位、进行立体匹配和三维重建的算法,其抗噪声能力、边缘处理能力和亚像素插值精度,决定了硬件潜力能被发挥出多少。
第三类:被测物体自身特性
- 表面光学特性:这是最大的挑战之一。最理想的表面是漫反射白色。高反光/镜面(导致过曝和畸变)、纯黑(吸收光,信噪比低)、透明/半透明(光穿透或散射)、吸光绒面都会严重降低精度甚至导致测量失败。
- 表面几何特征:陡峭边缘、深孔等结构可能因遮挡而产生数据缺失(阴影),影响该区域的精度。
- 物体状态:测量过程中物体的任何振动或移动都会导致图像模糊和严重的运动伪影,必须使用全局快门相机并控制好拍摄时机。
第四类:测量环境与条件
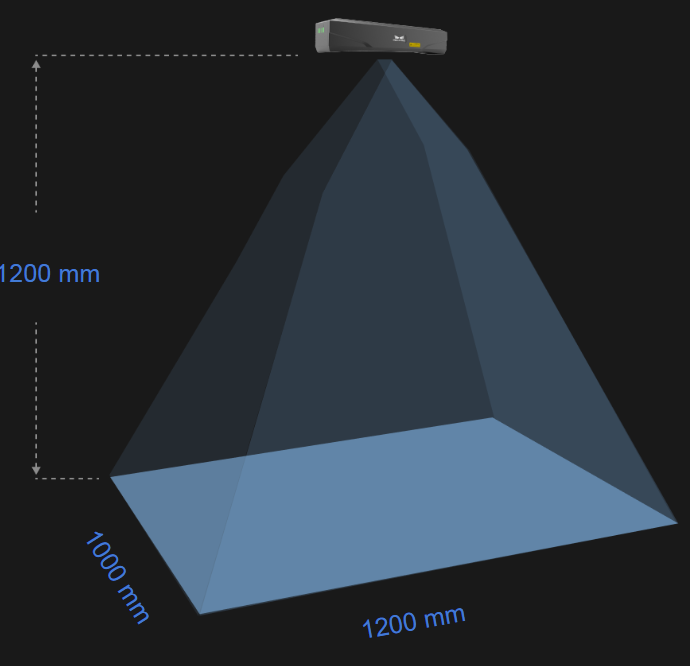
- 工作距离与视场:这是选择相机的首要参数。在相机分辨率固定的前提下,视场越大,工作距离通常越远,单个像素代表的实际尺寸就越大,精度相应降低。
- 环境光干扰:尤其是太阳光或特定频率的工频照明,会淹没投影的结构光图案,大幅降低信噪比。通常需要在室内使用,或加装窄带滤光片配合特定波长的光源(如蓝光)。
- 温度与振动:工业现场的环境振动会影响标定参数的稳定性;温度变化可能导致镜头和机械结构发生热胀冷缩,影响长期精度。
对于机器视觉系统集成和用户,在选择3D结构光相机时需注意以下几点:
- 明确需求:首先要区分对重复精度还是绝对精度的要求更高,并确定可接受的误差范围。
- 正确选型:根据被测物体的大小、距离、表面材质选择合适基线、分辨率和光源波长的相机。
- 优化环境:控制环境光,减少振动,对于反光物体可使用消光喷粉。
- 确保高质量标定:使用高精度标定板,严格按照流程操作,定期复校。
- 综合评估:不要只看厂商宣传的单一精度数字,必须结合其标称的工作距离、视场大小和测试条件来理解,并尽可能在实际场景中进行验证测试。
通过系统地理解和控制这些影响因素,才能让3D结构光相机在机器视觉应用中发挥出预期的、稳定的高精度性能。
烟台致瑞图像技术深耕3D视觉领域十余年,有2D视觉/3D视觉及AI检测众多应用案例,如果你还有更多关于机器视觉应用解决方案的疑问,欢迎咨询0535-2162897/15315450859 孙女士。我们可以根据您的要求进行多样化定制




 QQ客服:3043595743
QQ客服:3043595743 微信:13361353066
微信:13361353066 电话:0535-2162897
电话:0535-2162897 邮箱:image@ytzrtx.com
邮箱:image@ytzrtx.com