




 致瑞新闻
致瑞新闻什么是3D点云?一篇文章带你读懂3D影像的身世之迷
当你用手机拍下一张照片,屏幕上的画面由无数个色彩、亮度不同的像素点构成 —— 这是我们熟悉的 2D 视觉世界。但如果想让机器 “看见” 真实的三维空间,比如让自动驾驶汽车识别前方的行人、让机器人精准抓取桌上的水杯、让文物修复师复刻千年古迹,仅靠平面像素远远不够。这时,3D 点云就成了连接虚拟与现实的 “数字桥梁”。
什么是3D点云?
3D点云是由大量的、离散的三维空间中的点组成的数据集合。每一个点,都精确记录了其在三维空间中的位置(X, Y, Z),有时还携带着颜色、反射强度等信息。当海量的点汇聚在一起,便构成了物体表面的“数字骨架”,一个立体的、可被计算机识别和处理的数字模型就此诞生。
3D 点云的核心特性:为什么它能 “还原真实”?
1. 全维度空间信息:相比 2D 图像的 “平面投影”,点云直接记录三维坐标,不存在透视变形、遮挡导致的信息丢失,比如能清晰区分 “地面上的石头” 和 “悬浮的树叶”,这是视觉图像无法替代的。
2. 非结构化与高密度:点云没有固定的网格或行列结构,像 “数字沙子” 一样铺满目标物体,普通场景的点云密度可达每秒几十万甚至上百万个点,能还原毫米级的细节。
3. 多属性拓展:除了空间坐标,点云还能携带 RGB 颜色(和照片一致)、激光反射强度(区分金属、塑料、布料等材质)、时间戳(用于动态场景追踪),让机器不仅 “看见形状”,还能 “感知属性”。
3D点云是怎么来的?
点云的生成原理核心是 3D扫描技术,核心采集设备是激光雷达(LiDAR),也包括结构光相机、双目视觉系统等。主要通过测量传感器与物体表面之间的距离来获取点的三维坐标。主要技术有以下几种:
1. 激光雷达
通过发射激光束并计算激光从发射到被物体反射回来的时间(飞行时间,ToF),乘以光速再除以2,即可得到精确的距离。结合激光发射器的水平和垂直旋转角度,就能计算出每一个反射点的精确(X, Y, Z)坐标。是车载、测绘、工业检测的主流方式。
2. 摄影测量法
原理:通过从不同角度拍摄同一物体的多张2D照片,利用计算机视觉算法找到照片之间的对应特征点,通过三角测量法计算出这些特征点的三维坐标。
优点:成本相对较低,能直接获取颜色信息。
缺点:对光照和环境纹理要求高,精度通常不如激光雷达。
3. 结构光
原理:向物体表面投射特定的光图案(如条纹、网格),然后用一个或多个相机捕捉图案在物体表面的变形。通过分析这种变形,可以计算出物体表面的三维形状。
应用:常见于工业检测、人脸识别(如苹果的Face ID)。
藏在你身边的 3D 点云应用
点云技术因其能精确还原三维世界的特性,被广泛应用于众多领域:
你可能没意识到,但 3D 点云早已融入日常:
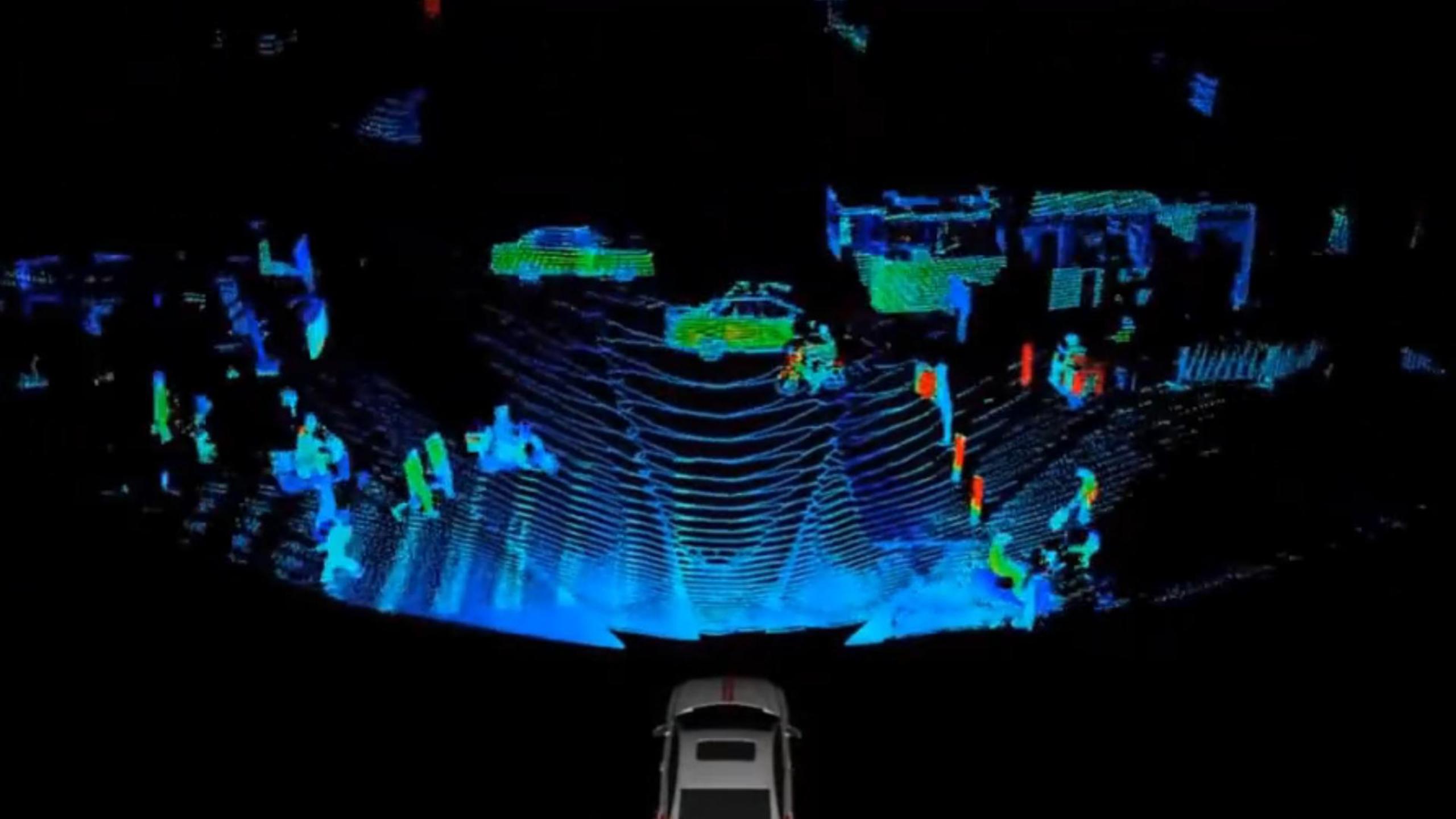
1、自动驾驶:车载激光雷达实时生成周边环境的点云,识别车辆、行人、护栏的位置和距离,是无人车的 “眼睛”;
2、智慧城市:无人机扫描城市建筑生成点云,用于测绘、违建排查、管线规划,替代传统人工测量;
3、工业制造:对汽车零部件、精密模具扫描生成点云,对比设计模型,检测毫米级的加工误差;
4、文化保护:扫描古建筑、文物生成点云,永久保存数字档案,甚至复刻 1:1 的实体模型;
5、消费电子:手机的 3D 结构光(比如 Face ID),识别面部轮廓完成解锁和支付。
3D点云,如同连接物理世界与数字宇宙的桥梁,它将现实的复杂与细腻,转化为计算机可以理解和改造的语言。在这个数字孪生时代,它正以其独特的魅力,为我们开启一扇通往未来无限可能的大门。
未来的点云,将不仅能更快速、更精确地描绘世界,还能被AI深度理解,赋予机器真正的三维视觉认知能力。




 QQ客服:3043595743
QQ客服:3043595743 微信:13361353066
微信:13361353066 电话:0535-2162897
电话:0535-2162897 邮箱:image@ytzrtx.com
邮箱:image@ytzrtx.com