




 致瑞新闻
致瑞新闻3D视觉系统搭建全攻略:从选型到部署,让机器人“看懂”世界
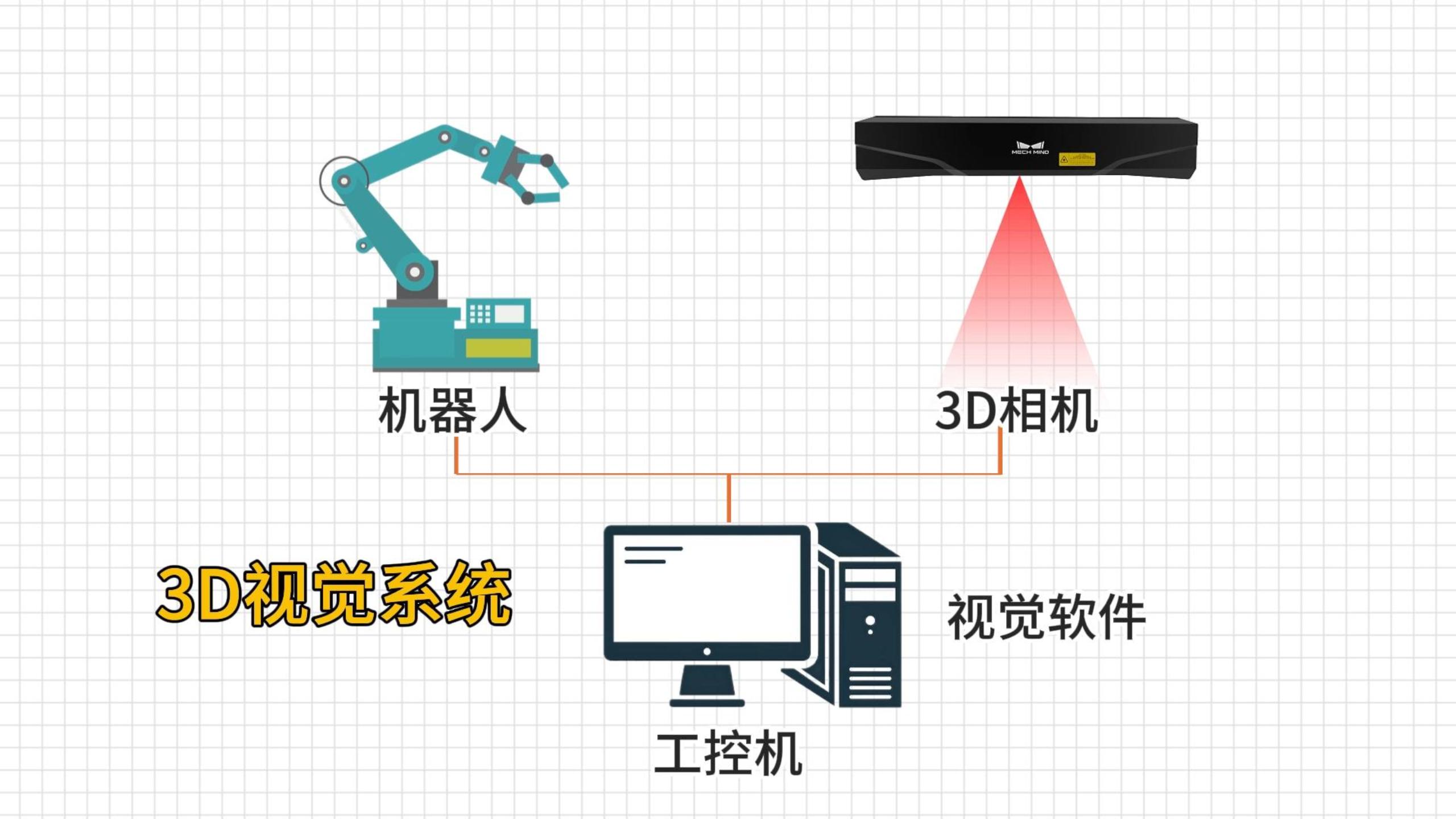
在智能制造浪潮席卷全球的今天,3D视觉引导机器人已成为无数工厂升级改造的“标配”。它能赋予工业机器人真正的“眼睛”和“大脑”,实现精准抓取、无序分拣、装配检测等复杂任务。但一套完整的3D视觉系统究竟该如何搭建?今天,我们就以典型的3D视觉引导机器人工作站为例,手把手带你走过从选型设计到落地部署的全流程。
第一步:选型设计——打好地基,事半功倍
搭建3D视觉系统的第一步,是结合项目需求进行精准的选型与方案设计。
1. 相机选型:视野、距离、精度一个不能少
每个项目都有独特的“视力”要求——工作距离有多远?视野范围多大?识别精度要到毫米还是微米级?我们需要参考相机型号的技术参数表和视野计算器,综合考虑这些因素,选出最适配场景的3D相机。合适的相机,是后续一切精准操作的基础。

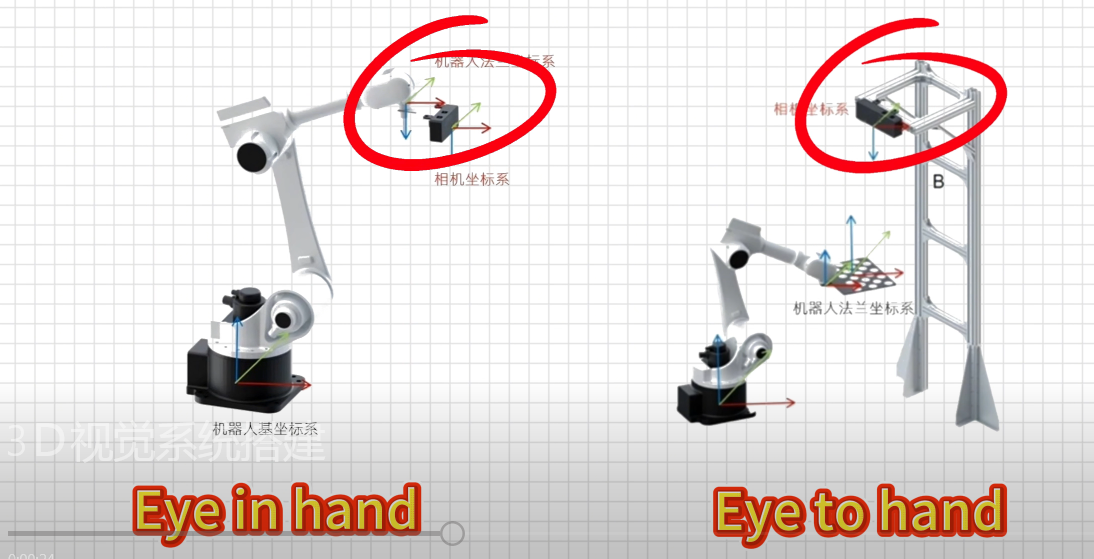
2. 安装方式:Eye in hand 还是 Eye to hand?
相机装在哪里,直接影响它的“视角”:
- Eye in hand(眼在手上):相机安装在机器人末端,跟随机械臂移动,适合对目标进行近距离、多角度的精细识别,如深筐抓取。
- Eye to hand(眼在手外):相机固定安装在支架上,视野覆盖机器人的整个工作区域,适合大范围定位,如工件上料、码垛等。根据实际工况灵活选择,才能让视觉发挥最大价值。
3. 通信方式:让视觉与机器人“说同一种语言”
视觉系统与机器人必须高效协同,常见的通信模式有两种:
- 主控通信:视觉软件作为“指挥官”,直接向机器人发送运动或IO指令,机器人则持续监听并执行。这种模式适合需要视觉主导的复杂流程。
- 接口通信:机器人作为控制端,通过指令触发视觉系统拍照、获取位姿数据。视觉系统则扮演“侦察兵”角色,按需提供目标信息。无论哪种方式,标准接口通信(如TCP/IP、Socket)或自定义适配器通信(Adapter)都能确保数据无缝流转。
第二步:搭建部署——软硬协同,实战落地
选型敲定后,就进入了紧张的现场搭建环节。
1. 硬件安装,稳字当头
将3D相机、工控机、机器人及其他辅助设备按设计图纸精准就位。线缆规范、支架稳固,是系统长期稳定运行的前提。
2. 通讯配置,打通“任督二脉”
将预置的机器人程序文件烧录至机器人控制器,并配置通信参数。这一步就像为双方建立专属热线,确保指令和数据能实时传递。
3. 手眼标定,建立空间坐标系
这是视觉引导的核心环节——使用高精度标定板,计算相机坐标系与机器人坐标系之间的转换关系。只有通过手眼标定,机器人才能理解相机看到的每一个点对应到现实空间中的具体位置。
4. 视觉系统配置,赋予“灵魂”
以行业领先的梅卡曼德3D视觉系统为例,其软件生态让配置变得高效直观:
- Mech-Viewer:负责3D相机的网络设置、曝光调节、图像采集,确保原始图像清晰、准确。
- Mech-Vision:图形化的机器视觉软件,通过拖拽算子即可构建识别流程,快速处理点云数据,精准定位目标物体的位姿。
- Mech-Viz:智能机器人路径规划软件,可自动规避碰撞,生成最优运动轨迹,即使面对复杂工件或密集布局也能游刃有余。
结语:让机器“看懂”世界,赋能智能制造
从选型设计时的精细考量,到搭建部署中的环环相扣,一套成功的3D视觉系统,离不开科学的方法与专业的工具。当相机“睁开眼”,软件“思考”,机器人“动手”,原本需要人工反复干预的工序就能实现全自动、高柔性化生产。
3D视觉,正在让机器真正“看懂”世界。无论是精密装配、无序分拣,还是智能搬运,它都已成为智能制造不可或缺的基石。如果你正准备为产线引入这样的“智慧之眼”,不妨从今天这篇攻略开始,迈出第一步。
烟台致瑞图像技术深耕3D视觉领域十余年,有2D视觉/3D视觉及AI检测众多应用案例,如果你还有更多关于机器视觉应用解决方案的疑问,欢迎咨询0535-2162897/15315450859 孙女士。我们可以根据您的要求进行多样化定制



 QQ客服:3043595743
QQ客服:3043595743 微信:13361353066
微信:13361353066 电话:0535-2162897
电话:0535-2162897 邮箱:image@ytzrtx.com
邮箱:image@ytzrtx.com