




 致瑞新闻
致瑞新闻主流的工业3D相机及其区别
机器视觉中,3D相机则通过获取三维点云数据,让机器真正“看懂”了世界。目前市场上主流的工业3D相机有结构光、ToF、双目视觉、激光三角测量等,它们之间到底有什么区别?今天我们就来一探究竟。
一、结构光:主动编码 + 三角测量
原理简述:投影仪向场景投射空间编码的图案(格雷码、相移条纹、散斑等)。相机拍摄被物体表面调制后的变形图案。通过解码得到每个像素在投影图案中的对应坐标,再结合投影仪‑相机标定参数,利用三角测量计算深度。
精度:编码方式决定了亚像素匹配精度
基线距越大、相机分辨率越高、投影图案频率越高,精度越高。理论上可达 0.01mm ~ 0.1mm 级
缺点:
1. 强光淹没:环境光强度超过投影图案强度时,信噪比急剧下降,解码失败。因此户外基本不可用。
2. 镜面/透射材质:高反光或透明表面会破坏投影图案的结构一致性。
3. 测量距离有限:通常 0.3m ~ 3m,远了投影光斑发散、能量不足。
典型场景:汽车车身焊锡检测(可精确到0.03mm的焊道缺陷)、手机中框平面度测量、3C电子产品零件尺寸测量
二、ToF:时间飞行法
原理简述:发射调制的光信号(脉冲波或连续波),测量从发射到反射返回的时间差或相位差。
dToF:直接计时,皮秒级精度,单光子雪崩二极管(SPAD)阵列
iToF:发射连续正弦波,测量相位偏移及深度。
核心优势:帧率高(通常>30fps),测距远,可以覆盖几十米甚至上百米的范围,适合大空间感知
为什么精度低
时间测量精度限制:即使 1ps 的计时误差对应约 0.15mm 距离误差,但实际系统受抖动、温度、噪声影响,典型精度为 1cm @ 5m(相比结构光低 1~2 个数量级)
空间分辨率:受 SPAD 或像素工艺限制,通常低于结构光和双目
典型应用:AGV 避障、大件行李分拣、作为机器人的安全避障主雷达
三、双目立体视觉
原理简述:模仿人类双眼,通过两个相机视差来计算距离。就像人的手指远近测试一样,两个眼睛看到的图像差异越大,物体就越近
核心优势:成本较低,不需要复杂的发射装置,在纹理丰富的环境中表现稳定。 被动感知:不发射能量,适合户外、电池供电设备
缺点:
1、对纹理依赖极高:白墙、纯色地面、水面、玻璃 → 匹配失败
2、光照敏感:过曝、欠曝、阴影区域也会破坏匹配
3、计算量大:SGM 或深度学习立体匹配在嵌入式设备上吃力
典型场景:机器人导航、自动驾驶辅助、双目避障、无人机定高
四、线激光:主动线扫描 + 三角测量
原理简述:激光二极管投射一条细直线到物体表面。相机与激光器成一定角度安装。激光线在物体表面发生高度调制,成像点在相机传感器上的位置随高度变化。
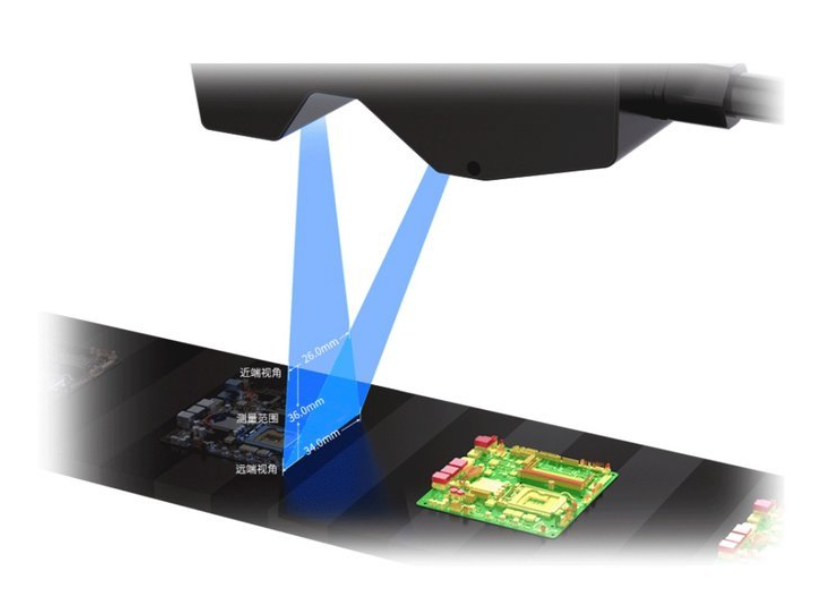
精度 :可达 0.1μm ~ 10μm 级,取决于激光线宽(光学衍射极限)、相机分辨率、镜头畸变校正精度
相比结构光,线激光的单线信噪比极高,抗环境光能力强(配合窄带滤光片)
缺点: 必须扫描:单线只给出一条轮廓。获得 3D 表面需要物体与激光器相对运动(传送带、转台、机械臂)。
速度慢:扫描时间随采样线数线性增长。
不适用于动态场景:无法捕捉瞬时全貌。
典型场景:半导体晶圆表面粗糙度检测、发动机关键零部件的轮廓测量、电池极片涂布厚度监测、PCB 焊锡高度检测、轮胎胎面轮廓检测等
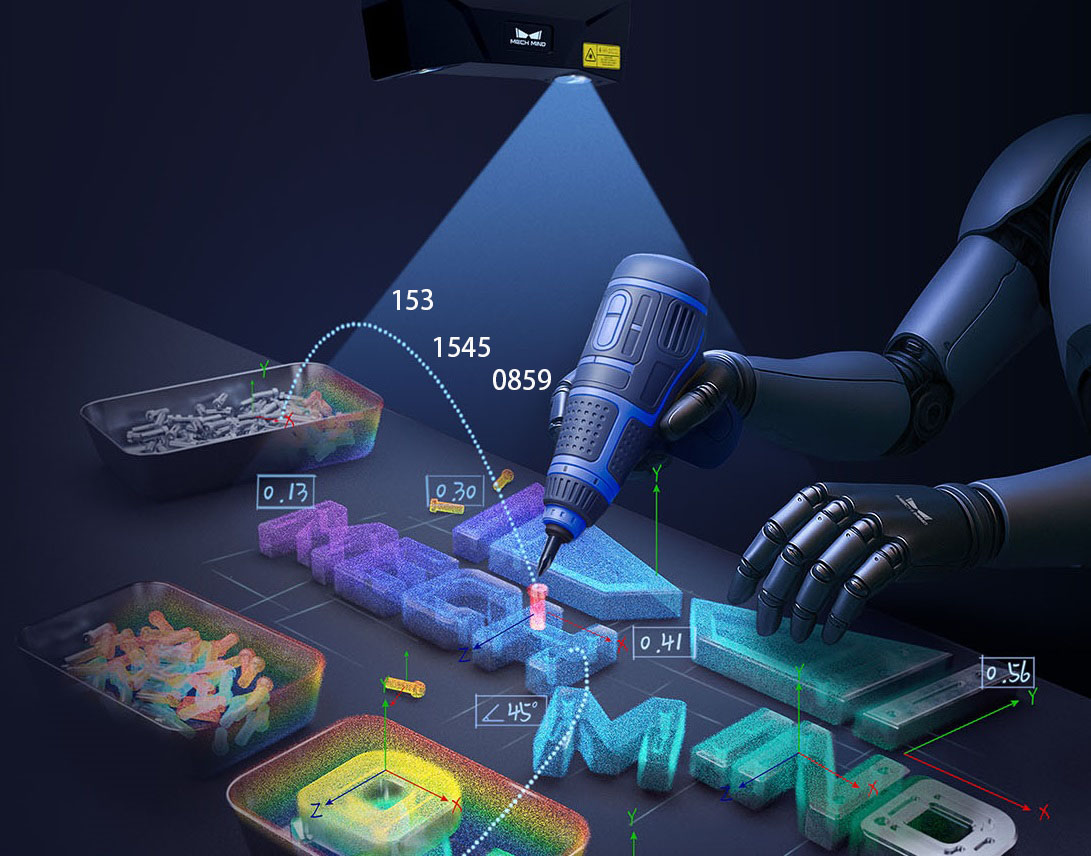
有完美的相机,只有最适合的方案。如果追求极致的检测精度,结构光和激光三角测量是你的必然选择;如果侧重高速抓取和环境感知,双目和ToF则更具成本优势。未来,随着视觉技术的进一步融合,工业机器人的“眼睛”将看得更远、更清、更准。



 QQ客服:3043595743
QQ客服:3043595743 微信:13361353066
微信:13361353066 电话:0535-2162897
电话:0535-2162897 邮箱:image@ytzrtx.com
邮箱:image@ytzrtx.com