




 致瑞新闻
致瑞新闻机器视觉如何引导机械手实现2D定位抓取的?
在自动化产线上,我们经常能看到机械手灵活地抓取工件,动作行云流水。但你是否想过:机械手是怎么“看见”工件的?尤其是在没有高度信息的2D视觉下,它如何实现精准定位?
什么是2D定位抓取?
简单来说,2D定位抓取就是让机械手根据二维平面上的图像信息,确定目标物体的位置和角度,然后准确抓取。它主要适用于物体工件高度一致,在平面内移动或旋转的场景,比如传送带上的工件、托盘上的零件、工作台上的物料等。

与3D视觉不同,2D视觉不关注物体的高度信息,而是专注于X、Y坐标和旋转角度——也就是常说的“2D位姿”。对大多数平面抓取场景而言,这已经足够。
机器视觉引导机械手2D定位抓取,可以拆解为四个关键环节。
第一步:图像采集
在机械手的工作区域上方或斜侧方安装工业相机,配合合适的光源,实时拍摄工作区域的图像。这是定位抓取的基础,就像人眼观察物体前需要充足的光线一样,2D视觉系统会通过工业相机、镜头与专业光源的协同配合,对目标工件进行精准图像采集。工业相机负责将物理场景中的工件转化为数字图像,镜头决定了视野范围与成像清晰度,而光源则是“点睛之笔”——根据工件的材质、颜色、反光特性,选择环形光、条形光等合适的光源类型,最大化工件特征与背景的对比度,避免因光照不均、反光等问题导致图像模糊,确保每一个工件的轮廓、边缘、特征孔都能被清晰捕捉,为精准定位打下基础。
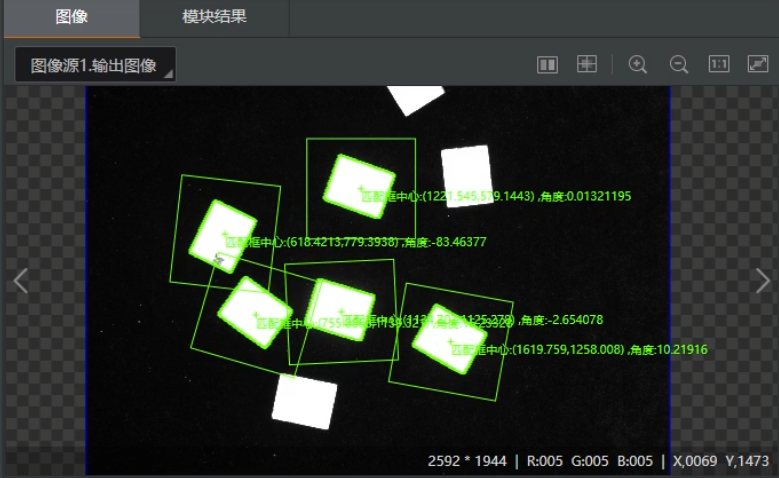
第二步:图像处理与特征识别
采集到的图像会被传输到视觉处理系统。系统通过算法对图像进行去噪、二值化、边缘检测等预处理,过滤掉环境干扰,让工件特征更加突出;随后,通过模板匹配、几何匹配、Blob分析等核心算法,然后从中提取目标物体的关键特征——比如轮廓、圆孔、边角、Mark点等,精准识别出目标。
第三步:计算位姿与坐标转换
识别到目标后,系统会计算出物体在图像坐标系中的位置(X、Y坐标)和旋转角度和。但机械手不认图像坐标,它需要的是机器人坐标系下的空间坐标。
这时候就需要“手眼标定”。通过预先标定好的相机与机械手之间的变换关系,系统将图像坐标系中的坐标转化为机械手能够识别的世界坐标系坐标,同时计算出工件相对于机械手的偏移量。
第四步:引导机械手完成抓取
坐标数据通过以太网、串口或现场总线发送给机械手控制器与PLC。机械手根据收到的位姿信息规划运动路径,控制末端执行器(真空吸盘、柔性夹爪等)精准抵达目标位置,以正确的角度接近工件,最后闭合夹爪,完成抓取。
整个过程从拍照到抓取,通常只需要零点几秒到一两秒的时间。
实施中需要注意什么?
当然,2D视觉抓取方案也并非万能。实际应用中需要注意几点:
- 物体必须位于同一平面:2D视觉不擅长处理高度方向有较大差异的堆叠物体,那是3D视觉的领域。
- 光照稳定性至关重要:环境光变化、阴影干扰、反光工件都会影响识别效果。一般需要配合专用的遮光罩和光源。
- 标定要严谨:手眼标定的精度直接决定抓取准确性,这一步需要专业工程师操作,不能马虎。
- 运动速度要匹配:如果传送带速度过快,或相机处理时间过长,可能出现“目标已跑远”的情况。需要合理设计相机触发逻辑和机械手的追踪抓取算法。
如果说机械手是人类手臂的延伸,那么机器视觉就是赋予这双手真正的“眼睛”。当机械手学会了看见,自动化才真正走向了智能化。随着工业自动化向柔性化、精密化、智能化升级,机器视觉与机械手的协同将更加紧密。2D定位抓取技术不再是简单的“看与抓”,更朝着AI自适应、低代码部署、多场景兼容的方向迭代,通过深度学习算法优化定位精度,通过模块化设计降低部署门槛,让更多中小企业能够轻松实现自动化升级。助力制造业实现“提质增效、降本减耗”的终极目标。




 QQ客服:3043595743
QQ客服:3043595743 微信:13361353066
微信:13361353066 电话:0535-2162897
电话:0535-2162897 邮箱:image@ytzrtx.com
邮箱:image@ytzrtx.com