




 致瑞新闻
致瑞新闻自驱型vs搭载运动平台:3D线激光轮廓仪到底该怎么选?
在工业智能制造的精密检测领域,3D线激光轮廓仪早已成为不可或缺的“火眼金睛”,凭借激光三角测量原理,精准捕捉物体三维形貌,解锁从微观缺陷检测到宏观尺寸测量的全场景应用。但面对市场上两种主流类型——自驱型与搭载运动平台型,很多企业在选型时常常陷入困惑:同样是线激光轮廓仪,二者到底有何不同?哪种更适配自身生产需求?今天,我们就来聊一聊两者的区别。
一、先搞懂原理:一条激光线,两种动法
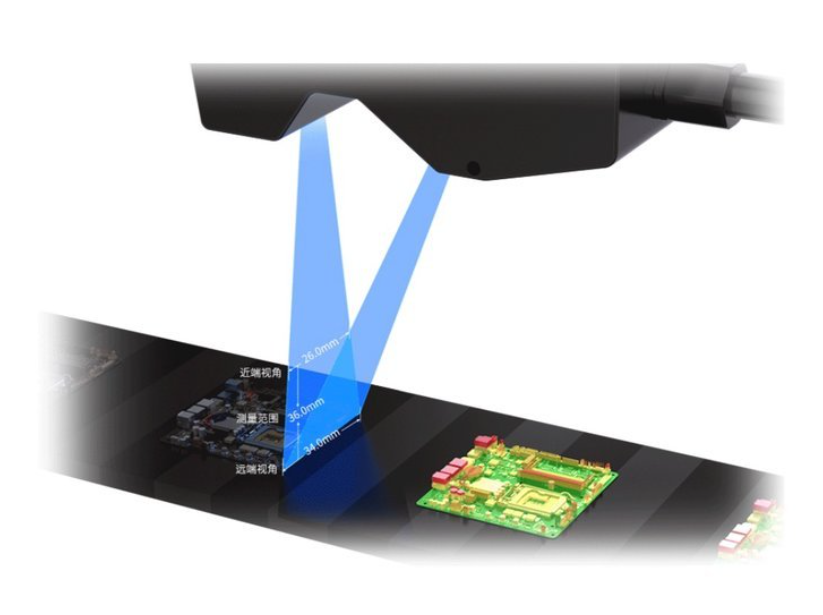
首先要明确一个核心前提:无论是自驱型还是搭载运动平台型,其核心检测逻辑一致——通过投射精密激光线,捕捉反射光形变并解算三维坐标,再通过连续采集的线轮廓数据拼接成完整3D点云,实现物体三维形貌的精准还原。
要想获得整个物体的3D轮廓,必须让激光线扫过整个被测表面。
而“扫过”这个动作,有两种完全不同的实现方式:
简单来说,就是“谁来带动激光线完成全面扫描”。
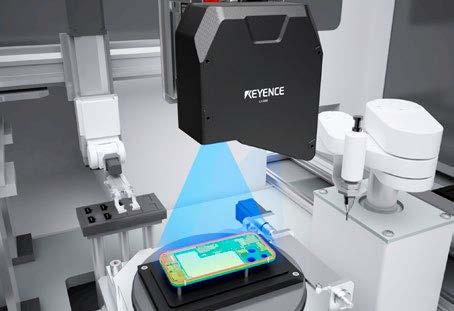
自驱型:传感器内部集成了精密的扫描机构和运动部件。工作时传感器本体不动,内部的光学模块或反射镜会自动移动,让激光线在物体表面扫描。
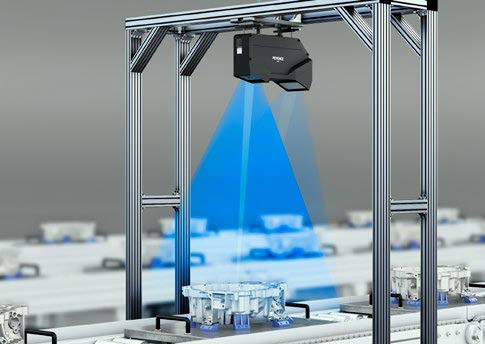
搭载运动平台:传感器只负责发射静态激光线和拍照,不内置任何扫描机构。要完成扫描,必须把它装在外部的直线滑台、机械臂或旋转平台上,靠外部平台带着传感器(或带着物体)移动。
二、自驱型:部署简单
优点非常突出:
即装即用,部署极快
自驱型轮廓仪出厂前已完成内部运动机构和光学系统的精密校准。你只需固定好传感器、接上电源和网线,几分钟内就能开始扫描。不需要额外配置运动控制器、编码器,也不用写复杂的运动程序。
精度稳定性高
因为扫描运动完全由内部高刚性、高精度的机构完成,不受外部平台振动、间隙或安装偏差的影响。重复精度轻松达到0.3微米级别,非常适合半导体、3C电子、精密五金等对重复性要求苛刻的场景。
可对静止物体快速成像
内部扫描机构一次完整扫描通常仅需0.2~0.5秒,即便物体完全静止,也能快速获得完整3D图。这极大简化了自动化集成——不需要精确控制物体移动速度和触发同步。
缺点:
- 扫描范围受限于内部机构行程,通常适合中小尺寸工件(如几十毫米到几百毫米)。
- 扫描路径固定,无法灵活适配异形曲面或超大工件。
典型场景:
手机中框平面度检测、芯片引脚共面性测量、精密注塑件全检……凡是标准尺寸、大批量、高速在线的应用,自驱型几乎是首选。
三、搭载运动平台:为“大尺寸+复杂轨迹”而生
核心优势:
扫描范围几乎无上限
只要外部平台的行程足够大,就能扫描几米甚至几十米长的工件,比如汽车车门、风电叶片、飞机蒙皮。
轨迹灵活多变
配合六轴机械臂或多轴运动平台,可以实现复杂曲面扫描(如涡轮叶片、异形管路),这是自驱型做不到的。
易于集成到现有系统
如果你的产线已经有机械臂或直线模组,直接把轮廓仪装上去,省去了额外购买自驱型设备的成本。
但代价也很明显:
系统集成复杂度高
你需要自己搭配运动控制器、驱动器、编码器,编写运动程序,并处理传感器与运动之间的同步触发。调试周期从几小时变成几天甚至几周。
精度受限于外部平台
普通直线滑台的重复定位精度约±0.05mm,比自驱型内部机构的精度低1~2个数量级。要达到微米级精度,必须选用昂贵的气浮平台或激光干涉仪反馈,成本陡增。
维护门槛高
任何一个环节(传感器、运动平台、同步信号)出现问题,都需要跨专业排查。
典型场景:
航空航天大型结构件测量、汽车白车身在线检测、大型铸件毛坯扫描、科研实验室需要频繁改变扫描轨迹的场景。

四、一张表看懂怎么选
|
考量因素 |
自驱型 |
搭载运动平台 |
|
部署时间 |
几分钟 |
几天到几周 |
|
重复精度 |
0.3 µm 级别 |
受平台限制 |
|
扫描范围 |
中小尺寸(<300mm常见) |
几乎不限 |
|
扫描路径 |
固定,适合平面或规则曲面 |
任意轨迹,适合复杂曲面 |
|
适用场景 |
高速在线、标准化产品全检 |
超大工件、异形件、科研 |
|
典型行业 |
3C电子、半导体、精密机械 |
汽车、航空航天、重工 |
希望这篇文章能帮你少走弯路。如果你有具体的检测需求,欢迎留言或私信,我们可以一起探讨最适合你的3D视觉方案。




 QQ客服:3043595743
QQ客服:3043595743 微信:13361353066
微信:13361353066 电话:0535-2162897
电话:0535-2162897 邮箱:image@ytzrtx.com
邮箱:image@ytzrtx.com