




 致瑞新闻
致瑞新闻3D视觉中“抓不准”的排查步骤|工业机器人抓不准,精度老是有偏差怎么办?该如何排查呢?
在3D视觉引导的工业机器人应用中,你是不是经常遇到机器人“抓不准”的情况。机器人平稳运行、相机正常拍照、软件正常输出坐标,可实际抓取就是偏移、夹偏、抓空、碰料。严重拖慢产线节拍、影响生产良率。那么遇到此类问题时我们该如何排查呢?我们以梅卡曼德3D视觉为例。
第一步:检查点云质量及匹配效果。
视觉系统输出的位姿精度,首先取决于目标工件的点云表达是否完整、无畸变。
1.1 点云质量检查
工具:MechViewer 或对应相机软件
检查项:
1)目标工件的主要特征面是否存在孔洞、缺失、边缘断裂
2)反光、吸光、透明材质区域是否导致点云局部丢失
3)是否有明显的离群噪点或飞点
判定:若特征面无法稳定提取,则后续匹配必然偏移
处置:调整曝光 / 增益 / HDR 参数,或更换照明方案(偏振、漫射光)

1.2 匹配结果检查
工具:MechVision 3D 匹配算法可视化输出
检查项:
1)匹配框或位姿标记是否与工件实际位姿对齐
2)匹配得分是否稳定高于阈值
3)同一工件多次匹配的位姿波动范围
处置:优化匹配参数(分数阈值、边缘权重、采样步长),必要时重建模板
若点云清晰、匹配对齐,但机器人仍抓偏 → 问题在后续环节。

第二步:相机内参确认
相机内参直接影响点云内部的几何保真度,是三维重建的底层基础。
2.1 内参检查方法
工具:MechViewer 内参标定模块
流程:
使用标准标定板采集多组图像/点云,按照程序内参验证工具
判定:
重投影误差超过标称阈值(如 >0.3 像素)
畸变系数出现异常跳变
处置:重新执行内参标定,标定后固定相机镜头锁紧环
>提示:相机在运输、震动或温度剧烈变化后,内参可能缓慢漂移,建议作为周期性校准项。
第三步:确认外参——手眼标定正确性验证
外参(手眼标定结果)决定了相机坐标系与机器人坐标系之间的刚性变换是否准确。这是现场最容易出问题的环节之一。
3.1 标定板验证法
工具:MechViewer + 标准标定板
步骤:
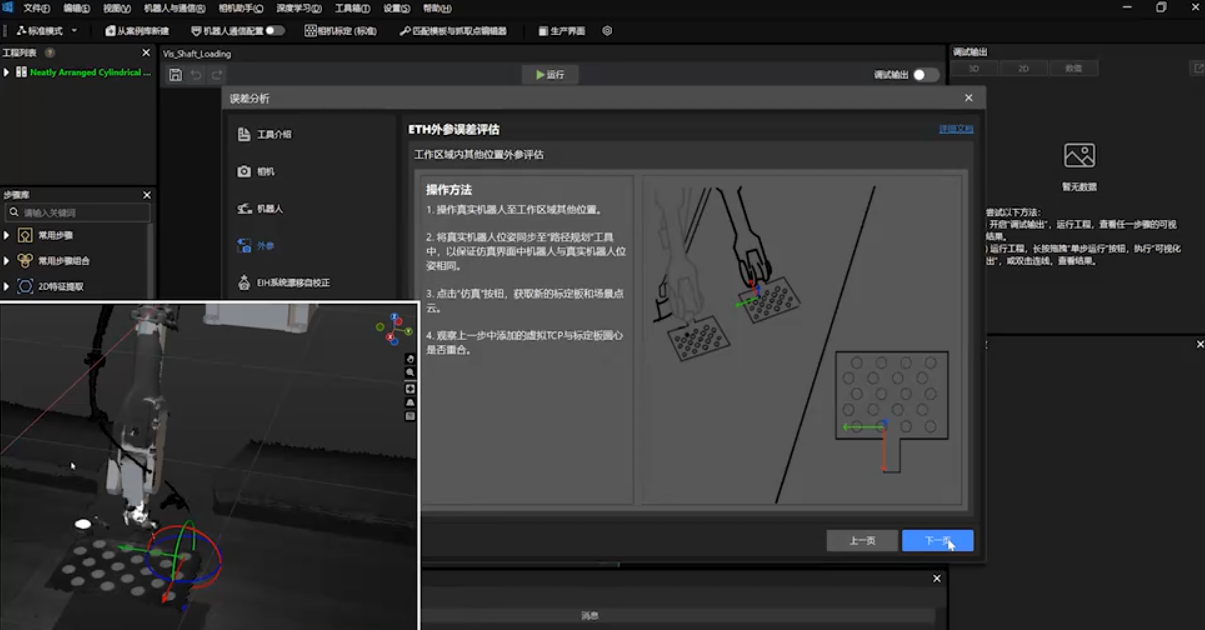
1. 建立获取标定板位姿的工程
2. 输入当前机器人位姿,获取标定板点云
3. 创建虚拟 TCP,使其与标定板圆心重合
4. 在工作空间内多次移动机器人(至少 5~10 个不同位姿),每次重新获取点云并查看虚拟 TCP 与圆心的重合情况
判定:
✅ 所有位姿下 TCP 始终与圆心重合 → 外参正常
❌ 偏差随位姿变化 → 外参错误或不可靠
3.2 偏差特征分析
若外参验证不通过,可能原因及处置:
相机或标定板发生过物理位移 → 重新执行手眼标定
标定时机器人位姿选取不当(仅覆盖小范围) → 扩大标定位姿空间
机器人编码器/零点漂移 → 先修复机器人再标定
第四步:确认机器人本体精度
即使视觉给出完美位姿,机器人自身精度不足同样会导致抓偏。
4.1 零点校准
检查各轴零点是否丢失(断电、电池欠压后常见)
使用千分表或激光追迹仪回零验证
处置:重新校准零点,或记录零点偏移补偿
4.2 绝对精度测试
方法:控制机器人沿某直线运动已知距离(如 500 mm)
测量实际距离(激光跟踪仪或量具)
偏差 > 1 mm 提示连杆参数或减速机存在问题
4.3 重复精度测试
方法:固定工件不动,同一视觉位姿重复抓取同一点 20 次
记录每次抓取后的实际偏差向量
4.4 偏差模式判别(关键)
根据偏差在空间中的分布规律,可快速定位问题层级:
|
偏差模式 |
坐标系关联 |
最可能原因 |
排查方向 |
|
固定方向偏差 |
机器人世界坐标系 |
基坐标系偏移 / 底座倾斜 / 用户坐标系错误 |
重新标定用户坐标系,检查机械安装面 |
|
固定方向偏差 |
机器人工具坐标系 |
TCP 不准 / 抓手机械变形 |
|
|
随机性偏差 |
无固定方向 |
减速机背隙 / 编码器噪声 / 关节松动 |
机器人本体机械检修 |
视觉引导的精度,从来不是一个单点问题,而是一条从点到云、从内到外、从眼到手的完整链路。




 QQ客服:3043595743
QQ客服:3043595743 微信:13361353066
微信:13361353066 电话:0535-2162897
电话:0535-2162897 邮箱:image@ytzrtx.com
邮箱:image@ytzrtx.com